آموزش حرکت از میان موانع به رباتها
دانشمندان به رباتها می آموزند که با جمع کردن پاهای خود در هنگام رسیدن به مانع بتوانند به طور موثر از میان موانعی نظیر پوششهای گیاهی حرکت کنند.
به گزارش ایسنا و به نقل از آیای، برای اینکه رباتها به طور موثر در عملیات جستجو و نجات شرکت کنند، باید به طور موثر از موانع سر راه خود عبور کنند. یکی از جاهایی که مشکل آفرین و حساس است و رباتها به سختی میتوانند در آن عبور کنند، مناطق دارای پوشش گیاهی است.
رباتها معمولاً از ترکیبی از حسگرها برای درک محیط اطراف خود مانند حسگرهای فراصوت، لیدار(تشخیص نور و محدوده)، حسگرهای فروسرخ و سیستمهای دوربین استفاده میکنند. با این حال، این موارد اغلب کافی نیستند تا به رباتها اجازه دهند از میان پوششهای گیاهی که معمولاً در محیطهای بیرونی یافت میشوند، عبور کنند. به همین دلیل است که مهندسان دانشگاه کارنگی ملون در حال کار بر روی حل این معضل خاص هستند.
بردن ربات به فضای باز
دیوید اولوگان، دانشجوی کارشناسی ارشد که در رشته مهندسی مکانیک در کارنگی ملون تحصیل میکند، در بیانیهای گفت: وقتی رباتها را به بیرون از خانه میبرید، مشکل تعامل با محیط اطراف به شکل تصاعدی دشوارتر میشود، زیرا باید در هر کاری که انجام میدهد، دقیقتر عمل کند. ربات و سیستم شما باید به اندازه کافی قوی باشد تا بتواند شرایط پیشبینی نشده یا موانعی را که ممکن است با آن مواجه شود، کنترل کند. مقابله با این مشکل که هنوز حل نشده، جالب است.
مهندسان برای دستیابی به چنین سیستمی در حال کار بر روی یک استراتژی راه رفتن واکنشی هستند تا بر روی یک ربات چهارپا اعمال شود. این نوع رباتها نسبت به همتایان چرخدار خود در اجتناب از شاخههای درختان بسیار بهتر هستند و بنابراین ماشینهایی بودند که توسط تیم کارنگی ملون انتخاب شدند.
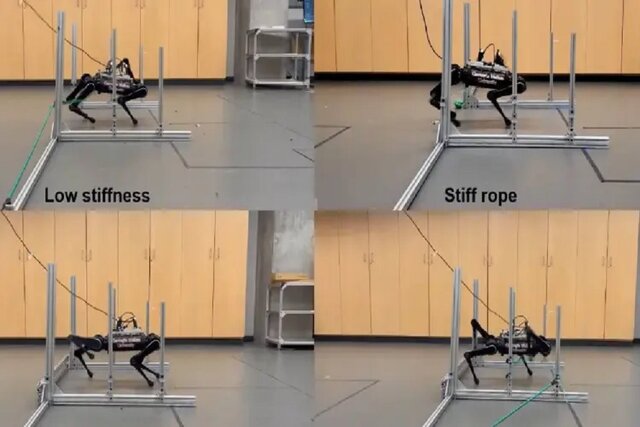
مهندسان اقدام به ساخت نوعی ربات کردند که در واقع میتواند اندامهای خود را کنترل کند تا ارزیابی کند که آیا چیزی روی آنها گیر کرده است یا نه و سپس اقدام مناسب برای آزاد کردن دست و پاهای خود را انجام دهد. چنین کاری آسان نیست.
اولوگان میگوید: رباتهای پادار میتوانند جای پای خود را انتخاب کنند و از روی چیزها رد شوند و موانع را از سر راه بردارند، نه اینکه مانند رباتهای چرخدار مجبور باشند از روی همه چیز رد شوند. اما مشکل این است که رباتهای پادار در هر گام باید در مورد جای پای خود استدلال کنند. این سیستم، فوق العاده ظریف است، چرا که مثلا اگر ربات به یک پله برخورد کند، میتواند سقوط کند. بنابراین ما به روشهایی برای واکنش به تماس خارجی نیاز داریم.
جمع کردن پاها
تیم مهندسی کارنگی ملون روشهای زیادی را برای رد شدن ربات از موانع مانند برداشتن گامهای بلند یا خم کردن زانو رو به جلو امتحان کردند. با این حال، هیچ یک از این روشها به خوبی عمل نکردند تا ربات بتواند پاهای خود را به صورت واکنشی جمع کند.
در نهایت ثابت شد که رویکرد جدید مهندسان مثمر ثمر است و ربات را چابکتر میکند و ربات به واسطه آن در مسیریابی در محیطی مملو از موانع، ماهرتر میشود. بهتر از همه، این رویکرد جدید را میتوان در سیستم عاملهای دیگر رباتها بدون نیاز به ایجاد هیچ تغییری در سخت افزار آنها گنجاند. این بدان معنی است که این سیستم بسیار قابل تنظیم و سازگار است.
کاربردهای این روش جدید بسیار زیاد و متنوع است. اجتناب از موانع و مسیریابی موثر برای طیف وسیعی از کاربردهای رباتیک، از جمله وسایل نقلیه خودران، هواپیماهای بدون سرنشین، رباتهای صنعتی و رباتهای خدماتی ضروری است.
همین طور که پیشرفتها در فناوری حسگرها، یادگیری ماشینی و الگوریتمهای رباتیک در حال انجام است، رباتها در همه جا از پیشرفتهایی در قابلیتهای خود برای حرکت در محیطهای پیچیده و پویا برخوردار میشوند.
دیدگاهها